
在实践中使用Fusion 360插件的项目是什么样子的?这是一个大学制造实验室Protolab如何使用多个外部轴。
我们总是喜欢听到RoboDK用户的声音,特别是当他们使用软件的新功能时。通常,当用户向我们发送一个问题时,我们就会第一次听到这些优秀的案例研究。
最近,来自斯威本科技大学Protolab的Andrew Tarlinton提出了一个关于在新的Fusion 360插件中使用机器人铣削的问题。
Andrew问:我如何将多个外部轴整合到我的机器人铣削项目中?
让我们看看那个项目!
满足……Protolab
Protolab工厂有实验室吗斯威本科技大学在维多利亚,澳大利亚。该实验室为大学的学生提供培训和制造服务,并拥有令人印象深刻的机器集合,包括五轴数控机床,SLA 3D打印机,当然还有机器人。
Andrew Tarlinton是Protolab的技术服务、设计和架构经理。他有工业设计和科学仪器制造的背景。
该实验室为大学提供了一个空间,让学生在实践中了解制造,并为大学的许多技术项目提供制造服务。

项目名称:多轴机器人铣削工作站
制造技术一直在改进,Andrew一直在寻找新的更好的方法来运行Protolab车间。他与我们取得联系是因为他正在使用KUKA机器人建立一个新的机器人铣削工作站。
安装使用多个外部轴,以允许一个极其灵活的机器人铣床站。目前,该团队主要将这种装置用于建筑研究,但安德鲁预计,他们很快就会开始将其用于家具制造等应用,可能还会创建汽车模型。
硬件设置
安德鲁和Protolab的团队决定采用以下机器人技术:
- 库卡氪120 -KR120是库卡机器人的一个系列,所有这些机器人的有效载荷都是120公斤,但覆盖范围不同。这个范围内的许多已经在RoboDK图书馆.该团队使用了基米-雷克南C4控制器它可以同时控制机器人和外轴。
- 吉隆坡4000- - - - - -这是一条运动距离7.9米的线性轨道外轴,支持的有效载荷高达4000公斤。
- KP1-V 500- - - - - -从库卡系列定位器这是一种垂直单轴定位器,有效载荷可达500公斤。该团队使用这个作为工件的转盘。
- KP1-H 500- - - - - -这是一个500公斤有效载荷的单轴定位器,可用于水平定位。
3个可编程外部轴与6个自由度(DoF)机器人的组合为Protolab团队提供了9个自由度来进行机器人铣削,KL 4000的7.9米距离提供了一个巨大的工作空间。
软件设置
尽管硬件设置复杂,软件工作流程却相当简单:
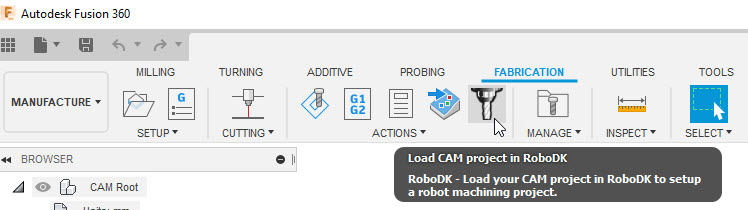
- 融合360 -加工部分的设计是在Autodesk的Fusion 360中完成的,这是一个基于云的CAD/CAM软件它比Autodesk Inventor有很多优势.一旦CAD模型设计完成,CAM路径就在同一软件中生成。
- RoboDK -使用融合360插件,无需离开融合360软件,利用RoboDK的机器人加工能力,即可立即生成机器人程序。
- 基米-雷克南C4 -然后将生成的机器人程序发送到KUKA控制器,由相关的后处理器生成KUKA的KRL编程语言的程序。这个控制器然后移动物理机器人通过铣削过程。
这是与任何类似机器人加工项目相同的软件工作流程。
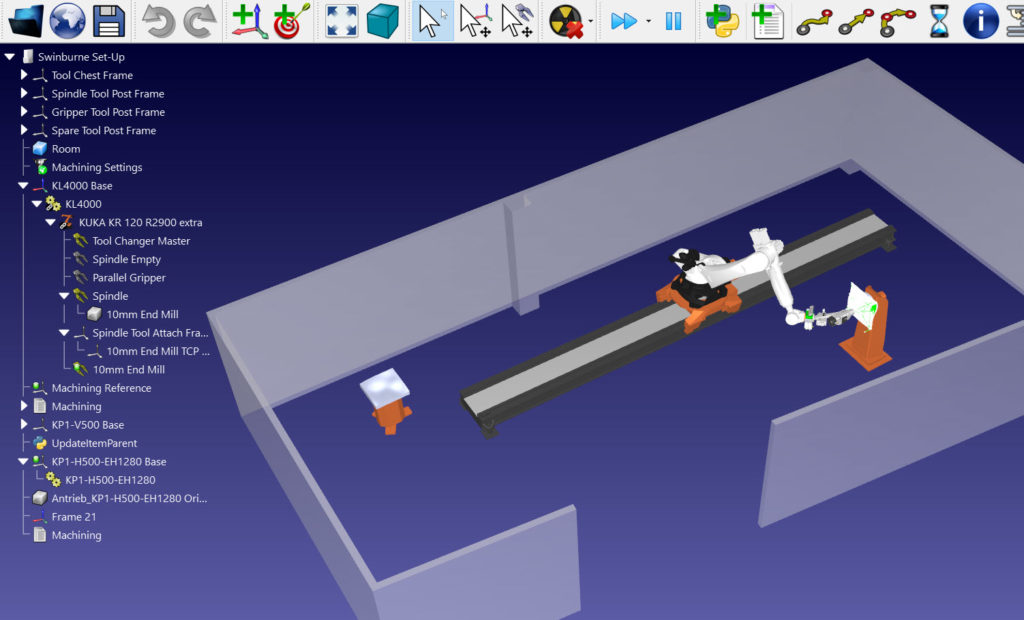
在RoboDK中处理多个新的外部轴
安德鲁·塔林顿最初联系我们寻求帮助。他使用的三个外部轴为更大的机器人加工任务提供了很大的灵活性。然而,他不确定如何将它们整合到RoboDK中。
我们的机器人图书馆已经包含了机器人(KR 120)和水平定位器(kt1 - h),但其他两个轴还没有。
当然,如果您要求,我们可以随时为图书馆添加新的轴、机器人和附件。然而,有一个办法可以让安德鲁很快找到他丢失的斧头……
解决方案:自定义轴和自动同步
RoboDK有一个非常大的图书馆已经支持的机器人。但是,它也可以轻松地支持库中没有的任何其他机制。所需要做的就是使用“创建机制”的工具。
安德鲁能够创造出两个缺失的轴作为一个线性和一个旋转轴组成的单轴机构。
在《RoboDK》中我们可以同步坐标轴。通过使一个或多个机构(如外部轴)成为另一个机构(如机器人)的子机构,该软件将集成两个机构的自由度,允许您无缝地控制整个设置,就像它是一个单一机构一样。
融合360 + RoboDK =无缝集成
使用融合360与RoboDK合作-通过插件-是在熟悉的软件环境中实现机器人加工的好方法(如果你已经是融合360的用户,当然)。
正如安德鲁·塔林顿告诉我们的:“我对从Fusion到RoboDK再到机器人加工的无缝衔接印象深刻。我很期待看到我们能实现什么!”
与传统的编程方法相比,使用RoboDK和Fusion 360组合的另一个好处是,非程序员更容易为机器人编程。
安德鲁解释说:“我真的认为这将让非机器人和编程专家有机会与机器一起工作。”
Protolab网站扩展一下,说:“随着这两个程序的简单功能,它把机器人的力量很好地接近我们的学生,允许更大的原型和概念的探索。”
你下一步打算部署哪个项目?请在下面的评论中告诉我们,或者加入我们的讨论LinkedIn,推特,Facebook,Instagram或在RoboDK论坛.


